Mit Drohnen gegen Waldbrände
Forschungsprojekt will den Einsatz von autonomen Ultraleicht-Hubschraubern erproben.
Die Waldbrände in Los Angeles haben erneut die Dringlichkeit effizienter und sicherer Brandbekämpfungsmethoden verdeutlicht. Angesichts solcher Tragödien gewinnt die Entwicklung innovativer Technologien zur Brandbekämpfung zunehmend an Bedeutung. Wissenschaftler der Hochschule München (HM) entwickeln im Rahmen des Forschungsprojekts Aider (Artificial Intelligence in Disaster Relief) mit Partnern aus Industrie und Forschung ein System zur autonomen Waldbrandbekämpfung. Das Team um die Alexander Knoll und Daniel Ossmann will ultraleichte Hubschrauber für den autonomen Einsatz im Schwarm umrüsten, um Waldbrände effektiver zu bekämpfen.

Weitere Nachrichten zum Thema
Drohnen auf Schwarm-Missionen

Ein Nest für Drohnen

Drohnen für Offshore-Windparks
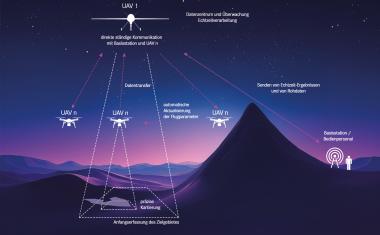
Die zunehmende Intensität und Ausdehnung von Waldbränden stellt eine erhebliche Bedrohung für Mensch, Natur und Klima dar. Trotz technologischer Fortschritte werden Vegetationsbrände weitgehend mit hergebrachten Methoden bekämpft. Besonders riskant ist der Einsatz von bemannten Löschflugzeugen und Hubschraubern, die nicht nur hohen Gefahren ausgesetzt sind, sondern auch ausschließlich bei Tageslicht operieren können. Hier setzt das Projekt Aider an: Ein Schwarm von unbemannten, umgebauten Ultraleicht-Hubschraubern soll autonom Waldbrände bekämpfen.
Die Maschinen können jeweils einen speziellen Wassertank mit einer Kapazität von bis zu 200 Litern tragen und das Wasser gezielt über Brandherden abwerfen. Dank künstlicher Intelligenz analysieren die Drohnen mithilfe von Sensorik die Brandentwicklung, passen ihre Löschstrategie in Echtzeit an und agieren koordiniert innerhalb des Drohnenschwarms. Das Team der Hochschule ist im Verbund der Partner zuständig für das gesamte Einsatzkonzept mit Betriebsstandards für den Drohneneinsatz und einer Gesamtsystemsimulation sowie für die Entwicklung von Flugführungsalgorithmen.
Das Gesamtsystem umfasst zwölf Drohnen, bestehend aus vier Schwärmen à drei Hubschraubern, die von einem mobilen Einsatzleitstand aus koordiniert werden. Die Drohnen werden per Straßentransport an ihren Einsatzort gebracht, an ihren Transportanhängern betankt sowie mit Wasser befüllt. Während des Einsatzes erfolgt die Steuerung hauptsächlich autonom, wobei ein Abschnittsleiter bei Bedarf eingreifen kann. Zusätzlich zum Abschnittsleiter Brandbekämpfung sind im Leitstand noch zwei weitere Personen für Koordination des gesamten Geschehens und für den Notfallbetrieb möglicher defekter Drohnen erforderlich.
Knoll sieht viel Potential in der Lösung: „Neben einer erheblichen Reduktion der Gefahr für Einsatzkräfte ermöglicht es eine durchgehende Brandbekämpfung – auch bei Nacht. Darüber hinaus sorgt die präzise Steuerung der Löschdrohnen für eine effizientere Nutzung der Wasserressourcen.“ Die Forscher wollen im Jahr 2026 einen ersten Prototypen vorstellen und mit einem virtuellen Leitstand den Schwarm-Einsatz simulieren. Mit der finanziellen Unterstützung des Bayerischen Wirtschaftsministeriums und der Zusammenarbeit mit verschiedenen Partnern aus Industrie und Forschung soll das Projekt zu einer modernen Waldbrandbekämpfung führen.
HS München / JOL